|
Project 3: Cyber Physcial System (CPS)ResearchCalibration:
Raw Data
PointCloud (absolute calibration) --- can have (X,Y,Z, R, G, B) at all points (well ones where the 2 cameras overlap)
How do we get this Calibrated Data --- there are some different possibilities
Why would you ever create your own calibration code? (HARDEST)
Are you going to go the HARDEST route --- NO!
EASY 1: Use methods in the OpenNI framework (shown in C++ but, have Java and other language support)
EASY 2: Use methods in the Microsoft SDK
EASY 3: Use methods that uses calibration parameters found by Nicolos Burros
|
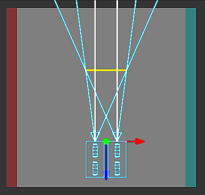
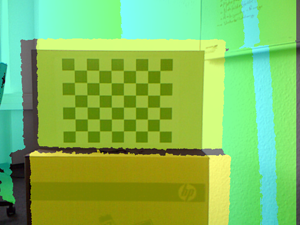
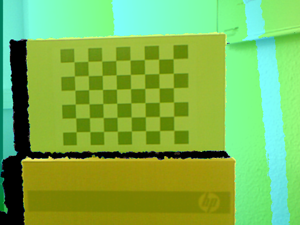

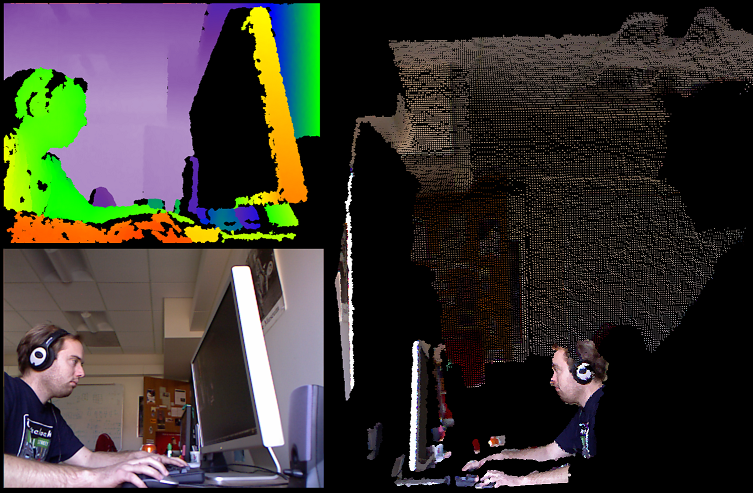
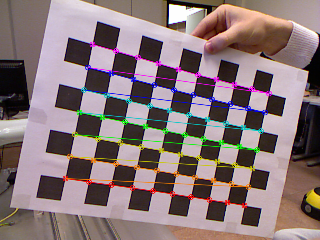 Image showing the RGB calibration target used to figure out camera parameters
Image showing the RGB calibration target used to figure out camera parameters