Post Processing for Object Detection - Non-Maximum Suppression (NMS)+Confidence Thresholding
Non-Maximum Suppression (NMS) is a crucial post-processing step in object detection that helps eliminate redundant and overlapping bounding boxes predicted for the same object.
How NMS Works:
-
Bounding Box Predictions: After the model predicts bounding boxes for detected objects, multiple boxes may overlap significantly (i.e., they might predict the same object).
-
Score Ranking: Each bounding box is assigned a confidence score (probability) indicating the likelihood that it contains an object. NMS starts by ranking the bounding boxes based on these scores.
-
Selection:
-
The box with the highest score is selected as a “keeper”.
-
All other boxes that have a significant overlap with this keeper box (determined by the IoU threshold) are suppressed (discarded).
-
-
Iterative Process: This process repeats for the next highest scored box that has not been suppressed until all boxes have been considered.
Example of NMS:
-
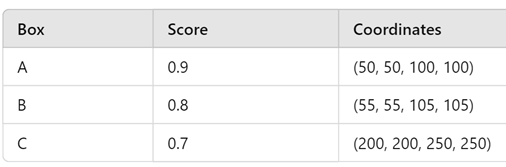
Suppose you have the following bounding boxes with their respective scores:
-
If the IoU threshold is set to 0.5:
-
Box A is chosen first (highest score of 0.9).
-
Box B has a high overlap with Box A (IoU > 0.5), so it gets suppressed.
-
Box C is then selected since it has no overlap with A and remains.
-
Importance of NMS:
-
Reduces False Positives: By eliminating duplicate boxes, NMS helps ensure that only the best prediction remains for each object, improving precision.
-
Performance Tuning: The choice of the IoU threshold is critical. A threshold that's too high might suppress too many boxes, while one that's too low might retain too many false positives.
Confidence Thresholding
Confidence Thresholding is another post-processing technique that helps to refine the model’s output by filtering predictions based on their confidence scores.
How Confidence Thresholding Works:
-
Set a Confidence Threshold: Before making any predictions, you determine a threshold value. Only boxes with confidence scores above this threshold will be retained.
-
Filter Predictions:
- If a predicted bounding box has a score below the threshold, it will be discarded.
- This step ensures that only high-confidence detections are considered for further processing or analysis.
Example of Confidence Thresholding:
- Continuing with the bounding boxes from the previous example:
- If the confidence threshold is set to 0.75, only Box A (0.9) and Box B (0.8) would be kept, while Box C (0.7) would be discarded.
Importance of Confidence Thresholding:
- Improves Precision: By removing low-confidence predictions, this technique can significantly enhance the model's precision, ensuring that the remaining detections are more likely to be true positives.
- Adjustable: The threshold can be adjusted based on the application. For instance, in safety-critical applications (like autonomous vehicles), a higher threshold might be preferred to minimize risks, while in a broader object detection task, a lower threshold might be acceptable to maximize recall.
Summary of Post-Processing Techniques
Both NMS and Confidence Thresholding are essential for refining the outputs of an object detection model:
- NMS helps eliminate overlapping and redundant bounding boxes, ensuring that each detected object is represented by a single box.
- Confidence Thresholding filters out predictions that are not confident enough, improving the overall quality of the detections.
Tips for Implementation:
- Tune Parameters: Experiment with different IoU thresholds for NMS and confidence thresholds to find the optimal settings for your specific task.
- Monitor Metrics: Use COCO metrics to evaluate the impact of these post-processing steps on precision and recall, ensuring that the adjustments lead to tangible improvements in model performance.
Implementing these post-processing techniques effectively can significantly enhance the reliability and accuracy of your object detection model's outputs
